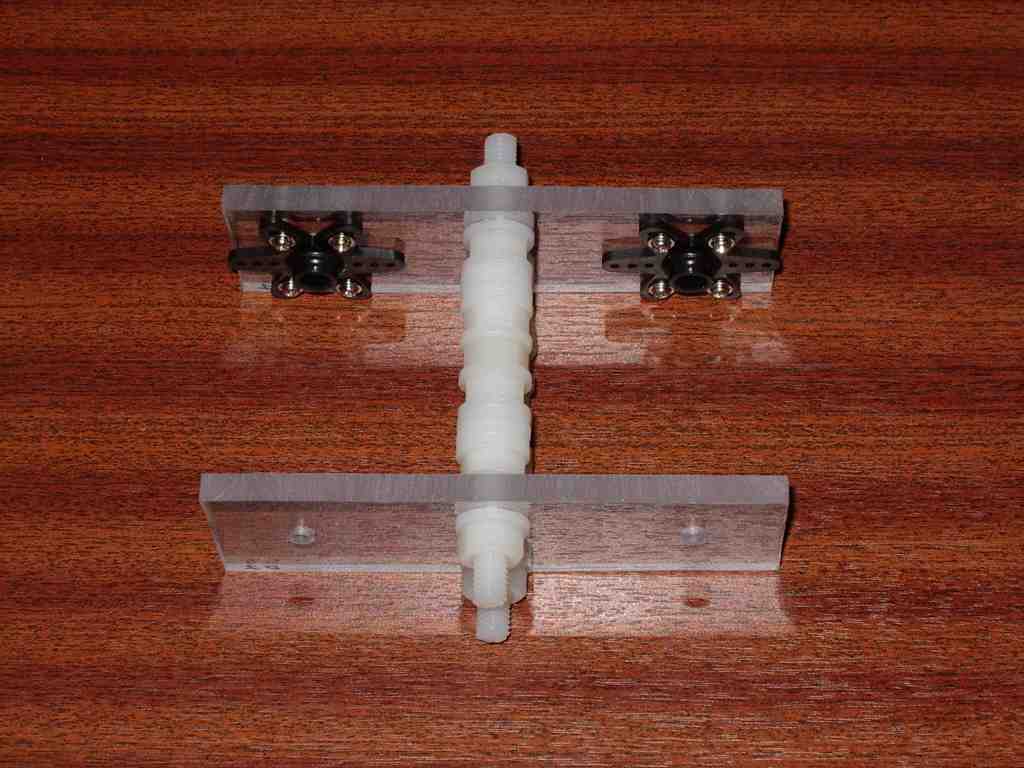
click here to see how to make bearing

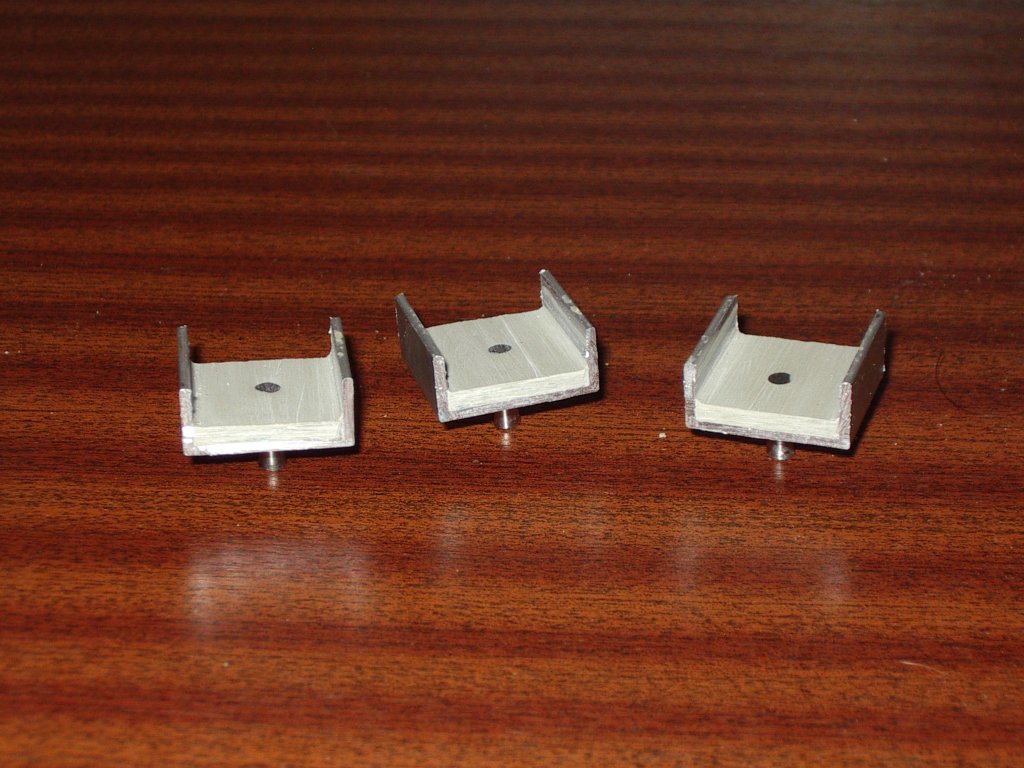
click here to see how to bracket

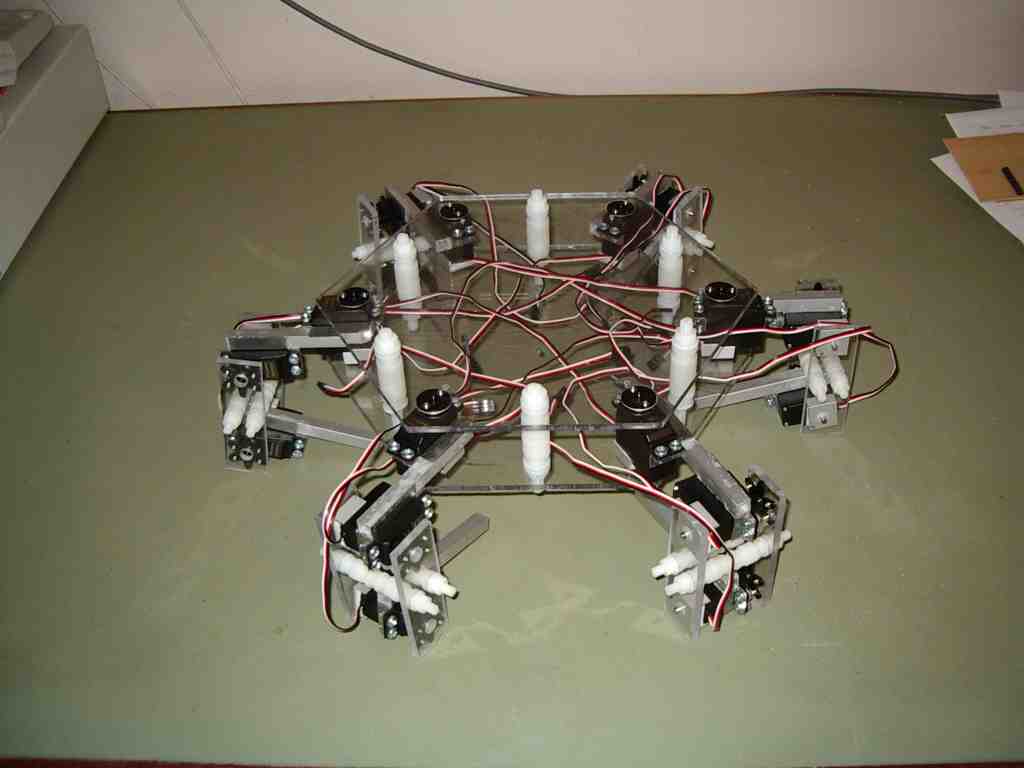
click here to see how to chassis

click here to see how to hip assembly
click here to see how to knee assembly

click here to see how to lower leg
This document does not give exact plans for building a robot, instead it shows you how to build a robot using dimensions relative to the parts you have or are able to get.
Except for the ability to drill good vertical holes, you are not expected to cut, shape or drill with exact precision or to use sophisticated tools.
Components that need to be aligned exactly (e.g. bearings) are built using techneques that overcome the need for precision engineering.
The only special tool you will need is a drill press (also known as a pillar drill) or alternately a drill stand. This tool allows you to drill perfectly vertical holes. You will not need an expensive drill press, a hobbyist grade drill press costing about 35 GBP will give very good results. The one major advantage that a drill press has over a hand drill plus drill stand combination is the ability of the drill press to be run at low speeds.
To make a donation (any amount of your choice) please click here
A servo controller library is already available for use with XCSB. It can handle 22 servos on a single 16F876. As a special time limited offer, anyone making a donation of 20 GBP or more for the use of this documentation will receive a copy of the source code for this servo library for use on a personal non-comercial basis. Currency exchange rates can be found here www.xe.com
Regardless of whether or not a PIC is used as the main controller for the robot, a PIC could still be used as a slave controller to control the servos. Such slave controllers are available to buy on the internet but they are expensive (costing around USD 100) even though they actually use a PIC to do all the work.